Un siècle d'innovation
pas à pas
Le Linriccan Wonder, présenté à New York par Houdina Radio Control, est une voiture contrôlée à distance par ondes radio. Il s'agit d'une Chandler de 1926 équipée d'antennes recevant des signaux envoyés par un véhicule suiveur. Ces signaux actionnent des moteurs électriques contrôlant les mouvements du véhicule. C’est l’une des formes les plus primitives de véhicule autonome.

RCA Labs développe en 1953 une voiture miniature guidée par des fils électriques intégrés au sol. Cette idée est étendue en 1958 sur une portion d’autoroute dans le Nebraska avec des circuits détecteurs enfouis dans la chaussée. Ces systèmes permettent de guider les véhicules et de détecter leur présence et leur vitesse. General Motors participe en équipant des véhicules avec des récepteurs radio et des systèmes d’alerte.
Le Transport and Road Research Laboratory au Royaume-Uni teste une Citroën DS guidée par des câbles magnétiques intégrés dans la route. Le véhicule atteint 130 km/h sans déviation, même dans différentes conditions météorologiques, avec des performances supérieures au contrôle humain.

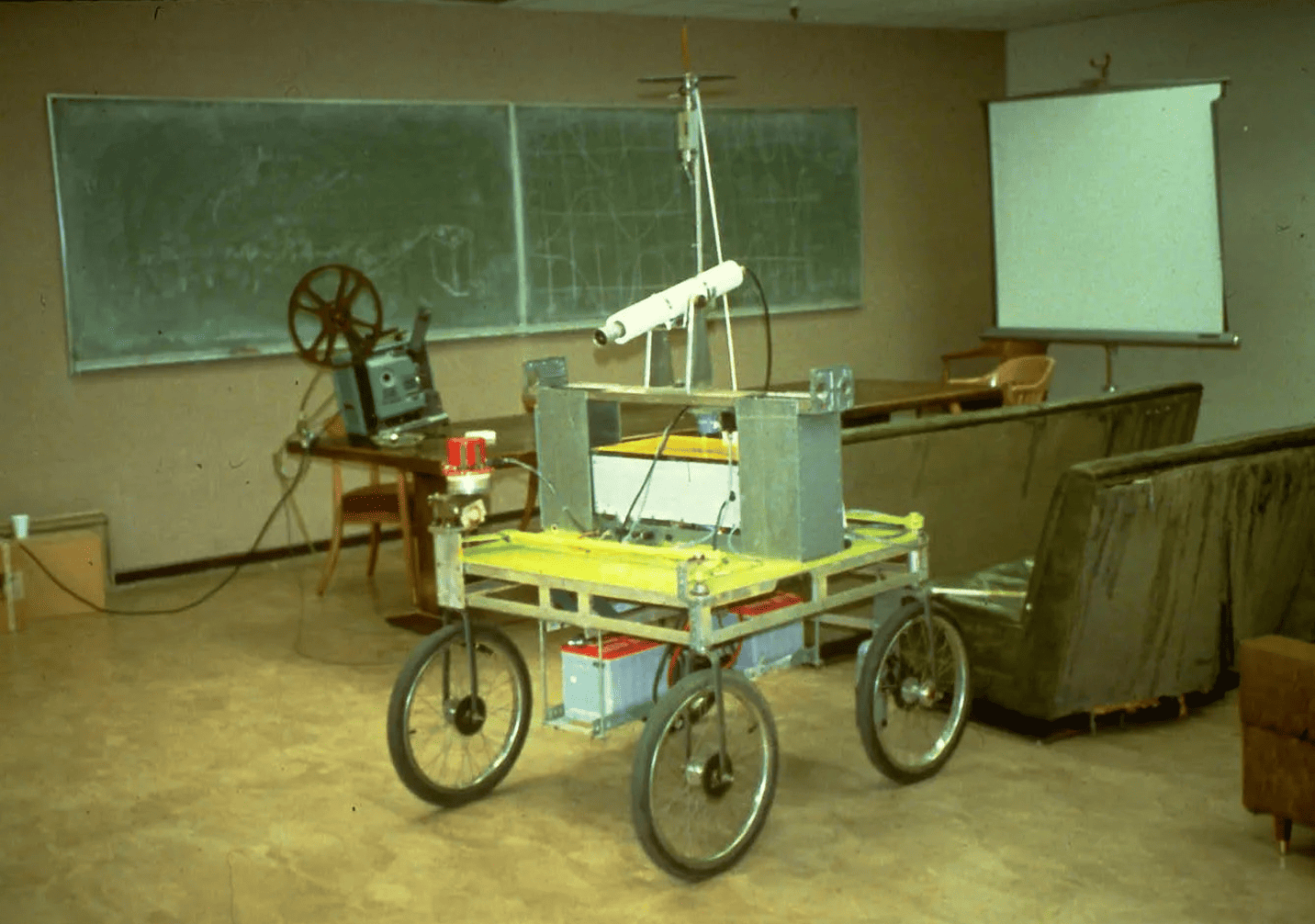
Le Stanford Cart, construit en 1961, est considéré comme le premier véhicule véritablement autonome. Au début des années 1970, il est capable de naviguer autour d’obstacles grâce à des caméras et une forme précoce d’intelligence artificielle. Cependant, ses performances restent limitées : il nécessite entre 10 et 15 minutes pour planifier chaque déplacement d’un mètre.
Un van robotisé Mercedes-Benz guidé par vision, développé par Ernst Dickmanns, atteint 63 km/h sans trafic. Il marque une avancée majeure vers les véhicules autonomes basés sur la perception.

La Commission européenne finance à hauteur de 800 millions d'euros le projet EUREKA PROMETHEUS (Programme for European Traffic with Highest Efficiency and Unprecedented Safety). Piloté principalement par Daimler-Benz (Mercedes) et l'université des Forces armées de Munich (Ernst Dickmanns), le projet réunit des constructeurs et universités de 19 pays. Il produit le véhicule VaMoRs et son successeur, précurseurs fondamentaux de la voiture autonome européenne.

Dans le cadre de PROMETHEUS, le véhicule VaMP d'Ernst Dickmanns réalise un exploit historique : le trajet Munich–Copenhague–Munich (1 758 km), à une vitesse maximale de 175 km/h, en gérant de manière autonome la plupart des situations de conduite sur autoroute (maintien de voie, dépassement, changement de file). Le taux d'autonomie dépasse 95 %. Ce n'est pas une expérience en laboratoire : c'est une autoroute européenne ouverte, dans la circulation réelle.

Le projet Navlab réalise un trajet de 5 000 km avec 98,2 % d’autonomie. Le véhicule utilise des réseaux neuronaux pour la direction, tandis que l’accélération et le freinage restent humains.

Une Lancia Thema modifiée parcourt 1 900 km avec 94 % d’autonomie grâce à deux caméras et des algorithmes de vision stéréoscopique.

Le ParkShuttle devient l’un des premiers systèmes de transport public autonome opérationnel.

Le projet Demo III démontre la capacité de véhicules autonomes à naviguer sur des terrains complexes en évitant des obstacles naturels comme des rochers et des arbres.

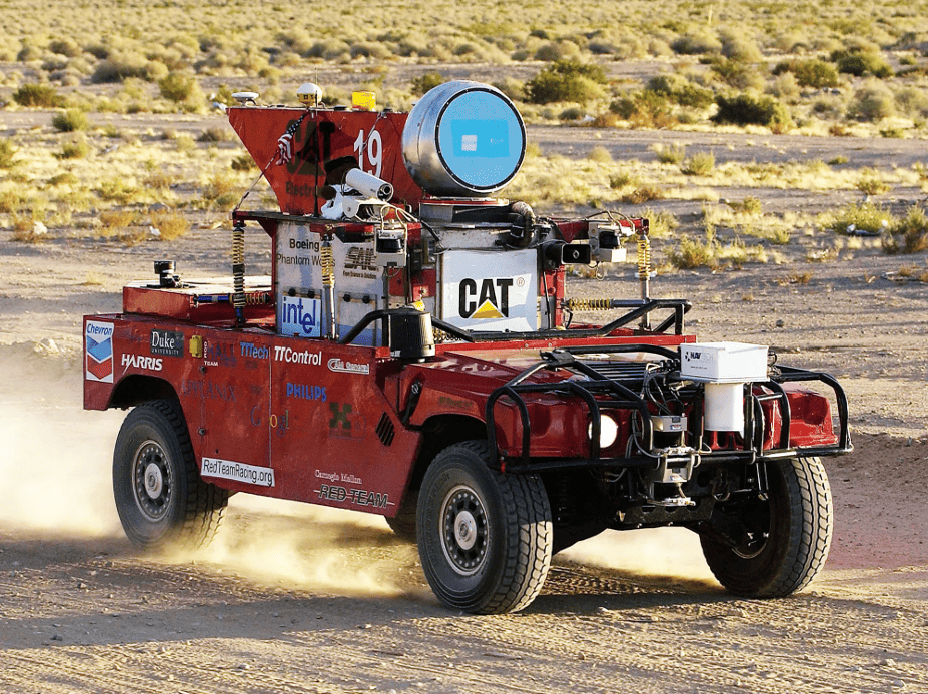
L'agence de défense américaine DARPA organise la première course mondiale de véhicules autonomes dans le désert du Nevada : 240 km à parcourir, 1 million de dollars à gagner. Le 13 mars 2004, 15 véhicules s'élancent. Aucun ne franchit la ligne d'arrivée. Le champion, « Sandstorm » (Carnegie Mellon), s'arrête après seulement 12 km, coincé sur un rocher.
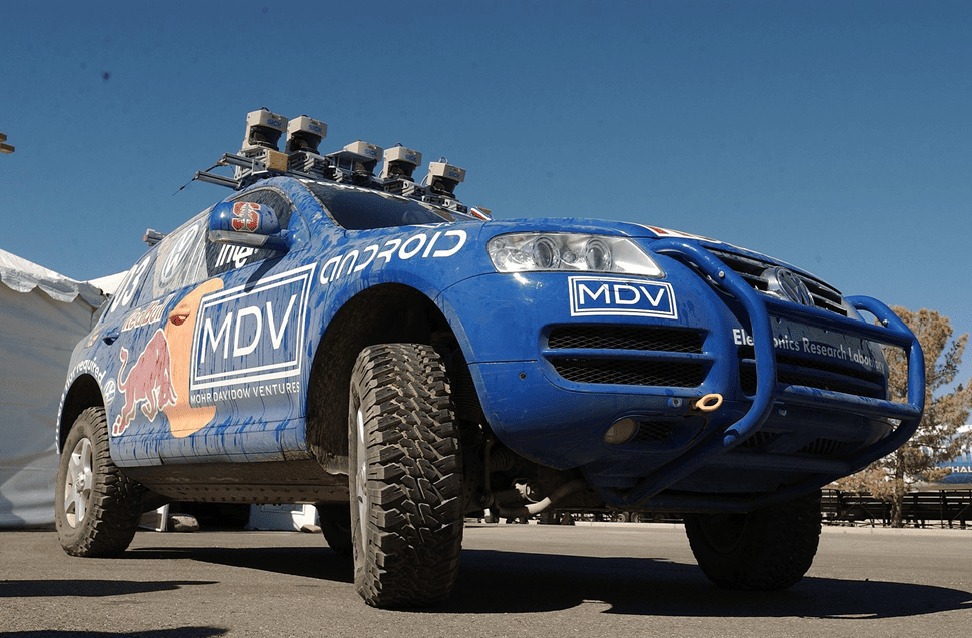
Un an après l'échec total, la DARPA double la mise : 2 millions de dollars. Cette fois, 5 équipes terminent la course. Le vainqueur est Stanley, véhicule de l'université de Stanford piloté par le logiciel développé par Sebastian Thrun. Temps record : 6 heures 53 minutes. Cette victoire révèle au monde entier le potentiel réel de l'IA pour la conduite autonome.
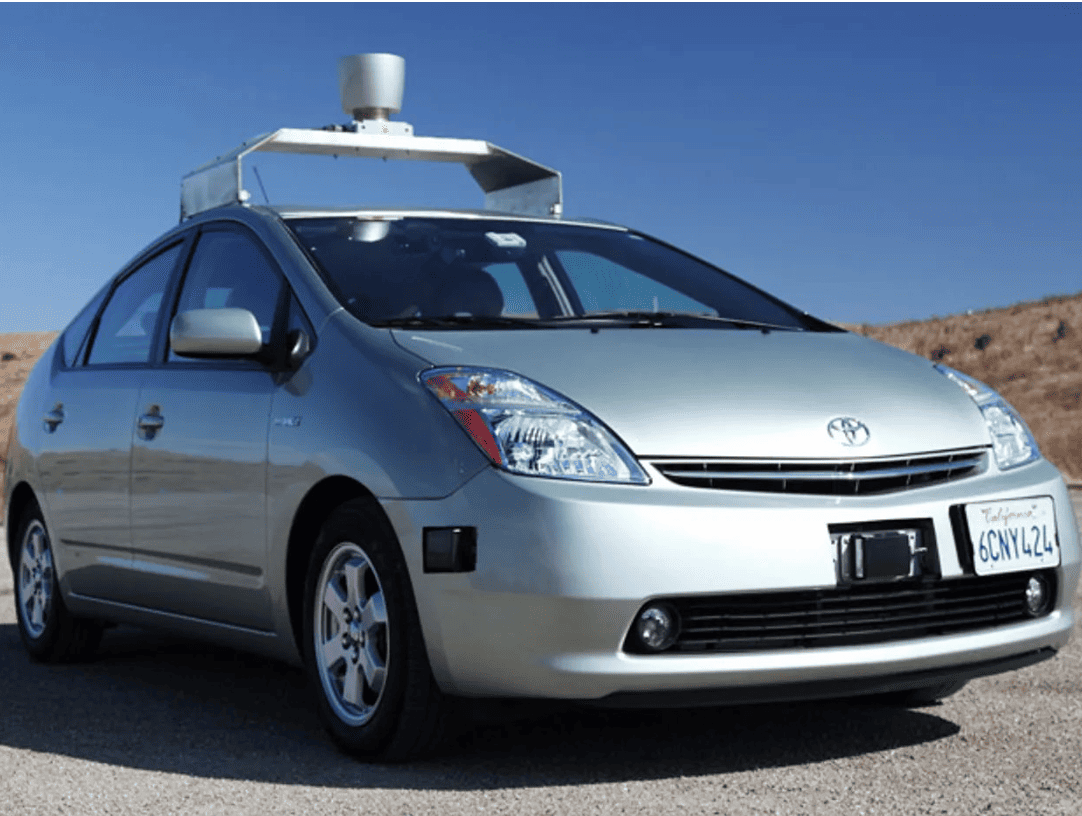
Inspiré directement par la victoire de Stanley, Larry Page fonde le Google Self-Driving Car Project et recrute Sebastian Thrun. L'équipe comprend des vétérans de la DARPA. En octobre 2010, Google annonce avoir parcouru plus de 225 000 km en Californie sans accident sur sept véhicules (six Toyota Prius, une Audi TT). Le monde entier découvre que la voiture autonome n'est plus de la science-fiction.
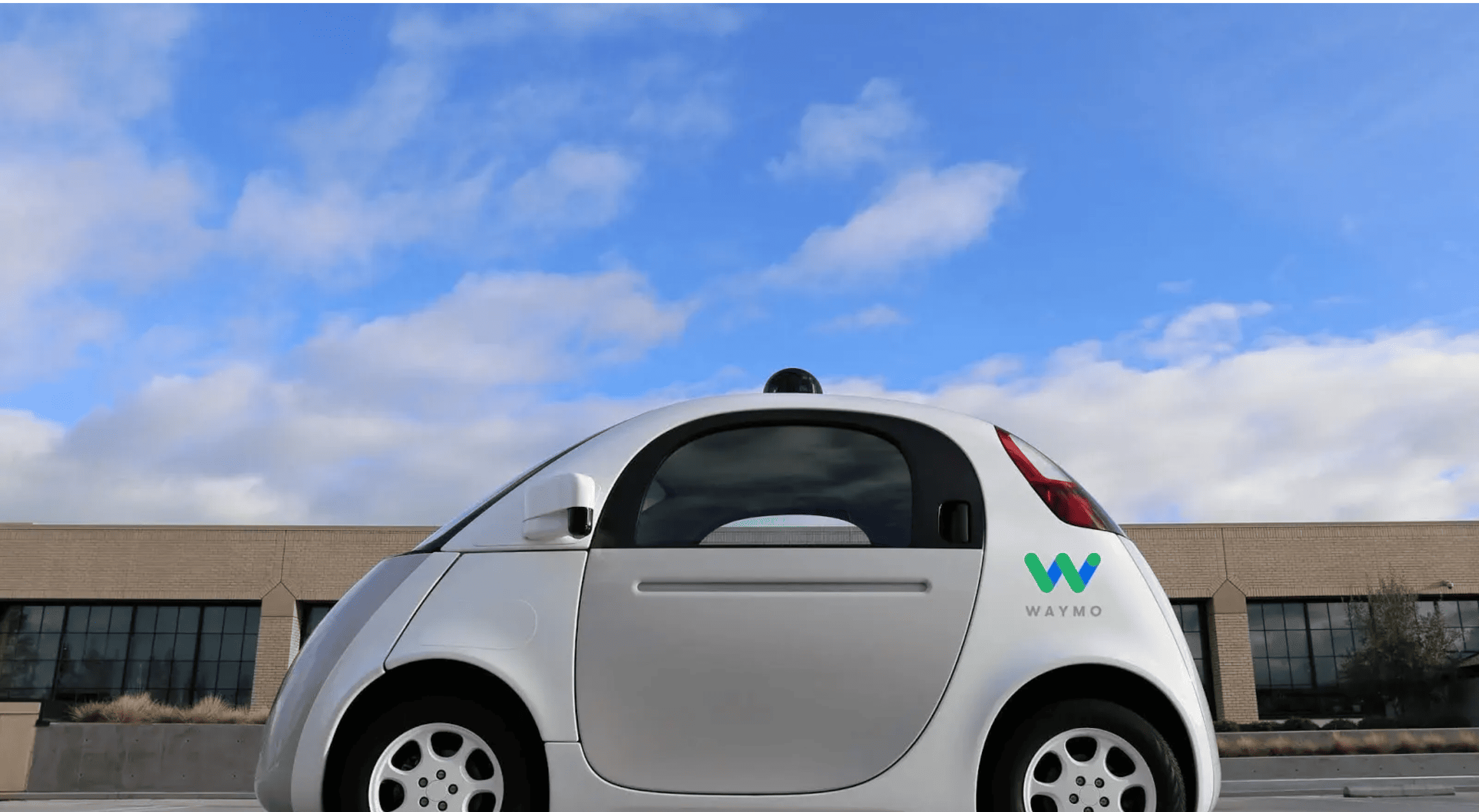
Google présente la Firefly, surnommée « Google Car » : un véhicule électrique deux places conçu entièrement par Google, sans volant, sans accélérateur, sans frein manuel. Maximum 40 km/h, autonomie 130 km. C'est la première voiture produite industriellement (200 exemplaires) sans aucun espace pour le conducteur. Testée sur piste puis sur routes californiennes dès l'été 2015, elle choque l'industrie automobile et inaugure le débat éthique sur la responsabilité en cas d'accident.


Le 7 mai 2016, Joshua Brown meurt dans un accident impliquant sa Tesla Model S en mode Autopilot en Floride. Le système de vision n'a pas distingué la remorque blanche d'un semi-remorque contre le ciel lumineux. C'est le premier décès mondial impliquant une voiture en conduite automatisée. L'accident soulève immédiatement la question de la responsabilité juridique et des limites des systèmes de niveau 2.
Google scinde son projet de voiture autonome en une entité indépendante au sein d'Alphabet : Waymo. L'entreprise hérite de millions de kilomètres de données de conduite, de la technologie LiDAR maison et d'une équipe d'élite. Chris Urmson quitte le projet. Waymo se concentre sur un objectif clair : commercialiser un service de taxi autonome dans les plus grandes villes américaines. Plusieurs des ingénieurs fondateurs partent créer leurs propres startups, formant la « diaspora DARPA ».
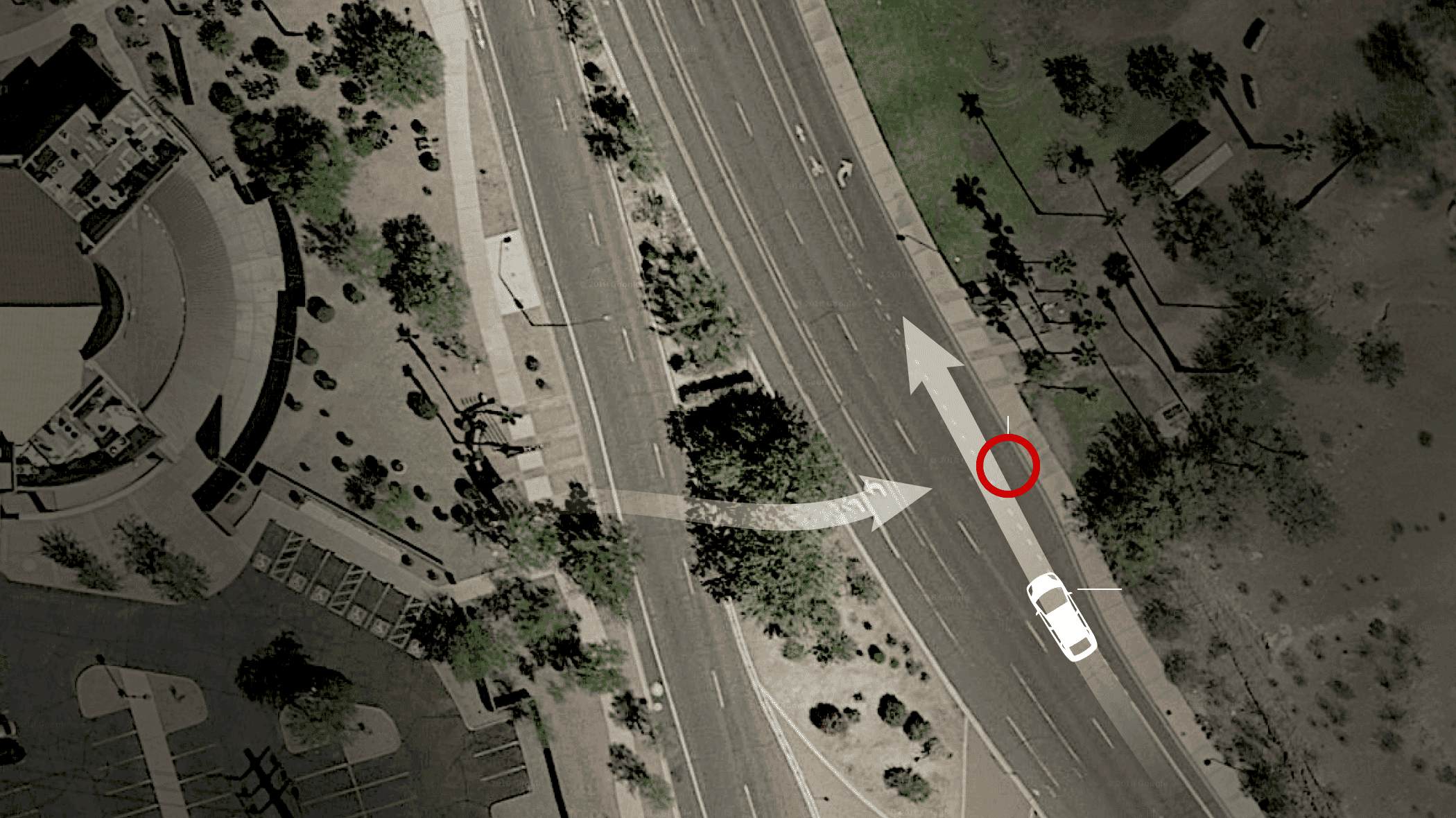
Le 18 mars 2018, un SUV Volvo d'Uber en mode autonome heurte et tue Elaine Herzberg, une cycliste traversant la route la nuit à Tempe (Arizona). C'est le premier décès piéton au monde causé par un véhicule autonome. L'enquête du NTSB révèle que le système avait détecté Herzberg 6 secondes avant l'impact mais l'avait classifiée comme un objet inconnu, puis une voiture, puis un cycliste — sans jamais activer le freinage d'urgence, désactivé pour éviter les faux positifs.
Le 5 décembre 2018, Waymo lance Waymo One, le premier service commercial de robotaxis au monde, à Phoenix (Arizona). Dans un premier temps, un conducteur de sécurité reste à bord. En novembre 2019, Waymo supprime ce conducteur pour une partie de ses trajets : c'est la première fois au monde que des véhicules de niveau 4 transportent des passagers sans supervision humaine.


Mercedes-Benz obtient l'homologation de son système Drive Pilot en Allemagne : premier constructeur à commercialiser un véritable niveau 3 en Europe et aux États-Unis. Le système prend entièrement le contrôle sur autoroute en cas de bouchon jusqu'à 60 km/h. Rupture juridique majeure : Mercedes accepte la responsabilité légale en cas d'accident quand Drive Pilot est activé. En 2020, Honda avait lancé le Sensing Elite au Japon, premier niveau 3 au monde, mais en production limitée (100 exemplaires).
En août 2023, les autorités californiennes autorisent Waymo et Cruise à opérer dans toutes les rues de San Francisco 24h/24, 7j/7. Mais le 2 octobre 2023, un véhicule Cruise percute une piétonne déjà blessée par un autre conducteur et la traîne sur 6 mètres. Cruise suspend ses opérations et ne les reprendra pas. Waymo continue : son service, testé dans des conditions plus difficiles (brouillard, rues pentues, trafic dense), démontre une robustesse supérieure. Cet épisode cristallise le débat réglementaire.


En 2025, Waymo franchit un cap décisif : 500 000 courses payantes par semaine, soit une multiplication par 10 en moins de deux ans. La flotte dépasse 3 000 véhicules dans 10 villes (Phoenix, SF, LA, Austin, Atlanta, Miami, Dallas, Houston, San Antonio, Orlando). En juillet, Waymo annonce avoir parcouru 100 millions de miles entièrement autonomes. En novembre, les robotaxis empruntent les autoroutes américaines pour la première fois. En février 2026, une levée de fonds de 16 milliards de dollars valorise Waymo à 126 milliards, en vue d'une expansion vers Londres et Tokyo.
